
Sonar
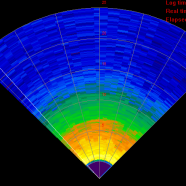
The system is equipped with an efficient sonar system, especially for the search for larger objects or vehicles. The makes locating them possible even in zero visibility within a radius of up to...
Read MoreDiving robot

The diving robot is about the size of a beverage crate and is driven by a total of 7 electric motors. It has a maximum operating depth of 200m and can reach a speed of up to 3.5 knots (6.5 km/h), allowing operation even in flowing water.
Read MorePower supply

We can provide a stable electricity supply for the equipment using a powerful generator even in remote locations or in operations from a boat.
Read MoreControl console

The control console is housed in a compact case and consists of a monitor, which displays live images of the diving robot, and the actual controller itself which steers the robot. In addition, a notebook can be connected to display the sonar image.
Read MoreControl cable

Even large search areas can be covered by the 300m long cable. Heavy objects can also be recovered due to its 200kg tensile strength.
Read MorePositioning system

It is particularly important in search operations to know what areas have already been searched by the diving robot and the diving robot’s current location. An object or a person can be located easily onshore by GPS. Unfortunately the GPS signal cannot be transmitted under the surface of the water. Acoustic solutions are used for locating positions in such situations. The exact position of the robot can be calculated with the aid of a transmitter that sends an acoustic signal to a receiver in the diving robot and receives the return signal.
Read More